Este sitio web utiliza cookies para que usted tenga una mejor experiencia de usuario. Las cookies no se utilizan para recoger información de caracter personal.
Si continúa navegando se considera que acepta su uso. Para más información consulte nuestra política de cookies.
proyecto moses Artrosis: prevención y tratamiento El triángulo de las Bermudas Inmovilización y traslado de accidentados Caballitos de mar Enfermedades infecciosas 39 plazas de médico ISM Torniquete: sí o no Apnea obstructiva del sueño Una sentencia histórica Concurso de fotografía: Faros de España Ganador y finalistas III Concurso de fotografía Viruela del mono Regularización por arraigo y formación Ganadores La luz que nos guía Mareas rojas: mitos y realidad Green Navigation, “el Google Maps del mar” Entra en vigor el Convenio 188 Salud emocional en las tripulaciones Cocineros a bordo Monstruos marinos Buques autónomos Elena Martínez Carqués Se necesitan médicos para el ISM Tiburón a la vista Acuerdo pensiones Allá donde mar y río son uno Observadores científicos Trámites más sencillos Mujeres en la pesca Vida más allá del trabajo Cien años de las cofradías de pescadores Seguridad a bordo en los petroleros Entrevista a Gonzalo de la Vega Conmoción cerebral Esofagitis eosinofílica CIAIM, los detectives del mar Estibadores portuarios 75 aniversario Colegios ISM Balance tráfico portuario Concurso fotografía Convenio 188 La mayor tragedia en la costa cantábrica Esos grandes desconocidos Pescadores de altura Trabajo dinámico y valorado Fin a la veda de Francia Concurso de fotografía De cómo acabó John Adams en Ferrol Retos de sostenibilidad en la pesca, acuicultura e industria transformadora española Prácticos de Cartagena Carta a los pensionistas Granjas de algas marinas Expresiones marineras Reunión directores Juan de la Cosa Inmersión profesional Case Seychelles Navidad a bordo Jornada de directores del ISM en Santander puertos secos Varada Esperanza del Mar - Revista Mar
PROYECTO MOSES: un diseño que revoluciona el transporte marítimo
Sistema autónomo de maniobra y atraque
10/05/2024
Marina mercante
Anabel Gutiérrez
Foto apertura: www.harbourpilot.es
El proyecto MOSES, en el que ha participado la Fundación Valenciaport, ha diseñado un buque feeder híbrido eléctrico, para el transporte marítimo de contenedores a corta distancia; un sistema autónomo de maniobra y atraque y una plataforma digital “inteligente” destinada a poner en contacto la demanda y la oferta de volúmenes de carga.
El proyecto MOSES se puso en marcha en julio de 2022 con la participación de la Fundación Valenciaport. Reunió a 17 socios de siete países europeos y más de 8 millones de euros de presupuesto, cofinanciados por el programa Horizon 2020 de la Comisión Europea. ¿El objetivo? Mejorar el reparto de contenedores en el transporte marítimo a corta distancia “mediante una serie de innovaciones que incluyen buques innovadores y la optimización de las operaciones logísticas”, explica Antonio Torregrosa, director general de la Fundación Valenciaport. Se ha diseñado un buque feeder con un sistema de propulsión sostenible preparado para operar en puertos pequeños.“FEEDER” SOSTENIBLE
Se refiere a la construcción y diseño de un pequeño buque portacontenedores feeder para el transporte marítimo de corta distancia, conocido por sus siglas en inglés SSS (Short Sea Shipping).
Una de sus características es su sistema de propulsión híbrido. Respecto a esto, Ignacio Benítez, técnico de Innovación de la Fundación Valenciaport y la persona que ha trabajado directamente en este proyecto, destaca que “se han realizado y evaluado distintos diseños de hibridación con distintas opciones de combustible”, teniendo en cuenta volumen, peso y emisiones totales. “En el caso de un sistema de propulsión mediante baterías, que sería el de menos emisiones -explica Ignacio Benítez-, la capacidad de almacenamiento de energía necesaria ocupa mucho espacio en el feeder. Por esta razón se consideran también diseños híbridos con pila de hidrógeno o motor de combustión con metanol”.
Otra de sus peculiaridades es que se ajusta a los casos en los que los puertos no dispongan de medios de carga y descarga, porque “estará equipado con un sistema robótico de manipulación de contenedores que es autosuficiente y que mejora la operatividad de puertos pequeños”, añade Antonio Torregrosa.
SISTEMA AUTÓNOMO
Por otra parte, también se desarrolla un sistema autónomo de maniobra y atraque. El funcionamiento es un poco más complejo de entender. Se han aplicado algoritmos de machine learning “basados en el comportamiento de enjambres o bandadas en la naturaleza y que se denominan algoritmos Swarm”, detalla Ignacio Benítez. Estos algoritmos “han sido entrenados con distintos casos de atraque, y se coordinan con un sistema de Autodocking en el muelle”. Toda esta operación está monitorizada y supervisada de forma remota desde un centro de control en el puerto. En este caso, la Fundación Valenciaport ha desarrollado un prototipo del llamado Shore Tugboat Control Station o STCS. Es una plataforma software que recoge los datos de los remolcadores (geolocalización, distancia al muelle, velocidad, etc) y los muestra gráficamente en tiempo real. Este sistema proporciona independencia operacional respecto de la disponibilidad de los servicios náuticos portuarios (prácticos, remolcadores y amarradores).
Una tercera parte de este proceso es el desarrollo de una plataforma de Matchmaking que utiliza también machine learning y big data. Su diseño lo ha desarrollado la Universidad Politécnica Nacional de Atenas (NTUA) con la colaboración de la empresa Danaos y tiene como objetivo conectar la oferta de rutas SSS con la demanda de bienes y mercancía, aprovechando al máximo su capacidad y optimizando los costes, a la vez que disminuyendo las emisiones globales. Esta plataforma implementa algoritmos de machine learning para la asignación óptima de envíos “atendiendo a una combinación de criterios, tales como tipo de mercancía, lugar de destino, etcétera y una arquitectura de big data con base de datos PostgreSQL preparada para la gestión simultánea de peticiones en la nube”, explica el técnico de Innovación, Ignacio Benítez. El objetivo del proyecto es explorar el uso de nuevas tecnologías que pueden mejorar la productividad de los puertos gestionados por la Autoridad Portuaria de Valencia y que permitan potenciar los puertos de Sagunto y Gandía. DEMOSTRACIONES PRÁCTICAS Dispondrá de un brazo robótico para la manipulación de contenedores.
Se han realizado tres pruebas. La primera de ellas se realizó en el puerto de Faaborg (Dinamarca) en octubre de 2023. Allí se probó el sistema de remolcadores autónomos, el sistema de Autodocking y la comunicación con la estación de control de remolcadores (STCS), empleando dos embarcaciones adaptadas, una unidad de Automooring, desarrollada en el proyecto, y una barcaza modificada.
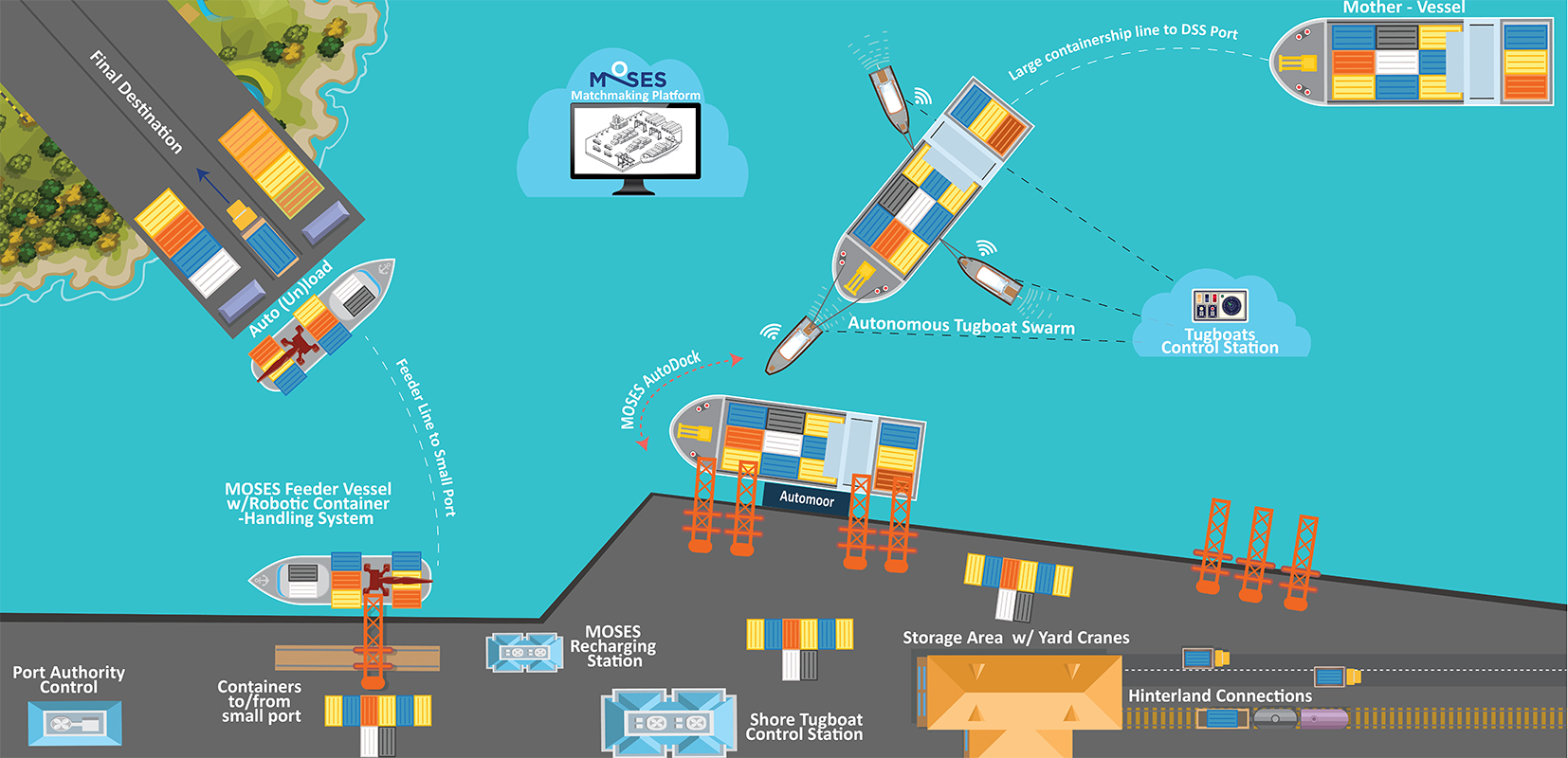
El segundo demostrador constaba de una operación autónoma de un feeder diseñado para los casos de uso contemplados en el proyecto para rutas Short Sea Shipping; la ruta Valencia-Sagunto-Gandía y la ruta Pireo-islas griegas-Mykonos. La demostración se realizó en las instalaciones del Maritime Research Institute Netherlands (MARIN), en Países Bajos, en septiembre de 2023.
La última de las demostraciones, de un brazo robótico para operación autónoma de carga, se realizó en las instalaciones de la firma holandesa TNO, en Países Bajos, en septiembre de 2023. Benítez nos cuenta que este brazo robótico realizó “pruebas de carga y descarga de contenedores de forma autónoma, empleando visión artificial y sensores de posición. El prototipo incluyó también un sistema de seguridad para cesar la operación al detectar personas u objetos en la zona de actuación. Las pruebas realizadas permitieron validar los desarrollos realizados y abrir el camino para seguir investigando en esta línea de la operativa autónoma supervisada de forma remota”.
ENTREVISTA
ANTONIO TORREGROSA
Director general de Fundación ValenciaPort
¿Cómo se ha integrado la Fundación en este proyecto?
Una de las principales actividades de la Fundación Valenciaport es la promoción de la innovación, impulsando el diseño, puesta en marcha y ejecución de proyectos de I+D+i orientados a la mejora de la competitividad de las empresas e instituciones del sector. En este sentido, el proyecto MOSES ha permitido evaluar la viabilidad de prototipos y desarrollos que podrían mejorar la eficiencia y la sostenibilidad en la operativa logística.
¿Cuál ha sido el objetivo?
El resultado final del proyecto es un rediseño completo de la operativa portuaria basada en la operación con feeders con medios propios de manipulación de contenedores y que no dependa de la disponibilidad de práctico o remolcadores para entrar en puerto. Con respecto a la participación de la Fundación Valenciaport, su principal rol es analizar cómo se verá afectada la operativa portuaria e identificar modificaciones que es necesario realizar en los sistemas de notificación a buque/puerto, operativa de terminales de contenedores, sistemas de carga de baterías del buque hibrido y estudiar los flujos de carga entre el puerto de Valencia y puertos de mediano tamaño.
Para hacernos una idea más precisa, ¿cómo sería el proceso, paso a paso?
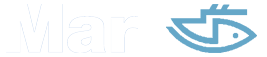
En primer lugar, la Matchmaking Platform configura la ruta Short Sea Shipping teniendo en cuenta la oferta y la demanda. Cuando el buque más grande llega al puerto principal, una flota de remolcadores autónomos (Autonomous Tugboat Swarm) realizarán la operación de atraque en un muelle que cuente con AutoMoor Unit. Todo el proceso se supervisa desde la STCS (Shore Tugboat Control Station). Parte de los productos son entonces trasladados a un feeder que incorpora un brazo robótico para la carga y descarga (MOSES Feeder Vessel with Robotic Container Handling System). El feeder se ha diseñado para tener un sistema de propulsión bajo en emisiones, bien puramente eléctrico, o híbridado con baterías. En ambos casos, se dimensiona un cargador en el muelle para las baterías del sistema de propulsión (MOSES Recharging Station). El feeder realiza la ruta SSS, evitando emisiones y congestión de tráfico por carretera, y descarga la mercancía en puertos más pequeños a lo largo de la ruta, de forma que se minimiza la distancia y la contaminación por emisiones de transporte pesado.
¿Qué limitaciones de los puertos pequeños y el SSS pretende solventar el proyecto MOSES?
Una de las dificultades en los puertos de tamaño mediano es la falta de rutas regulares. Es preciso realizar un estudio previo que demuestre la viabilidad de este tipo de rutas de SSS mediante feeders, de forma que un feeder pueda llevar la mercancía entre un puerto más grande y otro mediano, y el transporte de interior o hinterland pueda repartirse entre estos puertos según cercanía de los puntos de origen y destino, consiguiendo una mayor eficiencia y disminuyendo las emisiones totales.
Otra dificultad es la limitación o falta de una infraestructura adecuada para la carga y descarga de la mercancía. En este sentido, el feeder diseñado incluye a bordo un brazo robótico que permite realizar la operativa supervisada desde un centro de control remoto.